Chintan A. Dalal

- › About
- › Research
- › Publications
- › Teaching
- › Contact/Links
Chintan A. Dalal
› Research : GDRS :: Unmanned Surface Vehicle
›› Autopilot For An Unmanned Surface Vehicle
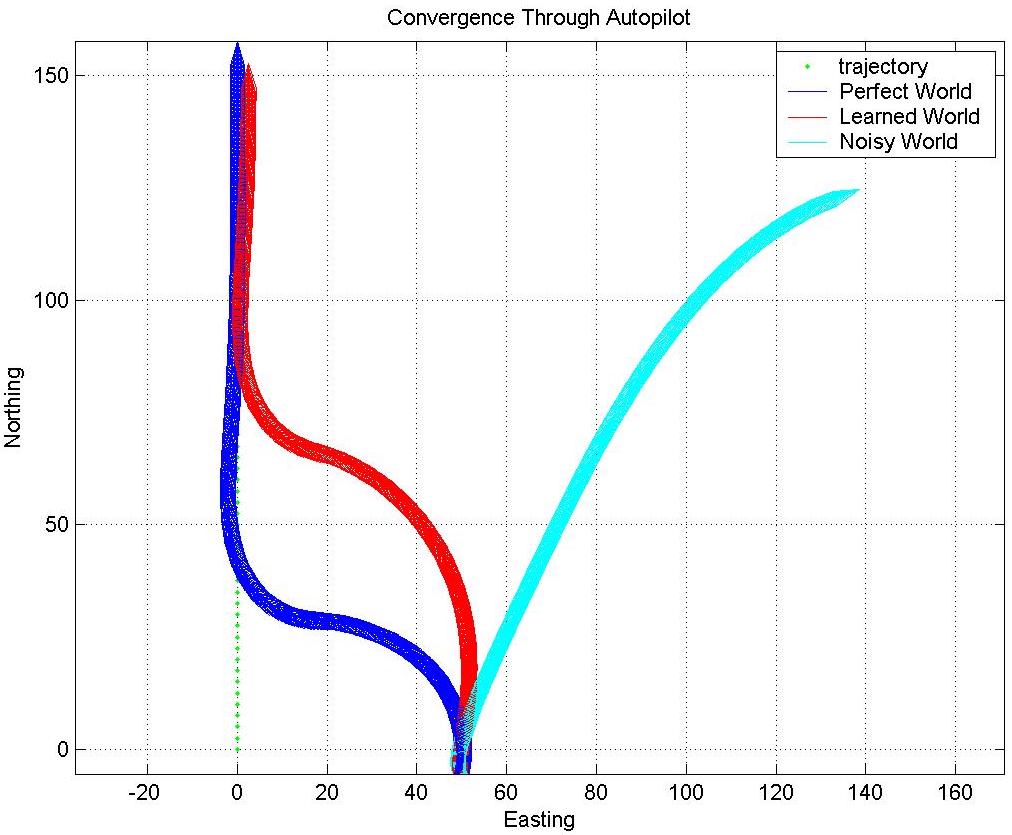
Unmanned surface vehicle (USV) refers to any vehicle that operates on the surface of the water without a crew. Some of the applications of USV which are now being used by the navy are in intelligence, surveillance and reconnaissance autonomous search and rescue and maritime patrolling. As a software engineer in GDRS, one of my responsibilities was to develop the theoretical frameworks for the autopilot design. We developed a rigid body model of the vehicle, modeled the physics based environmental effects on the vehicle, non-linear Lyapunov controller for the controls of the waterjets, extended kalman filter to reduce noise from the GPS/INS, and a pure pursuit path planner for obstacle avoidance.
››› My contribution to the development of Autopilot Design on an USV [PPT]
››› Current development on an USV at GDRS [Link]
![]()

